Remontage !
La première version vivante du flipper fonctionnait grâce aux contacts des bumpers et autres slingshots directement relié à la commande de la carte de puissance (transistor/mosfet). C’était amusant et ça permettait « aux gamins » de passer un peu de temps dessus.
Depuis quelques semaines, l’objectif était de réintroduire de l’intelligence dans la machine.
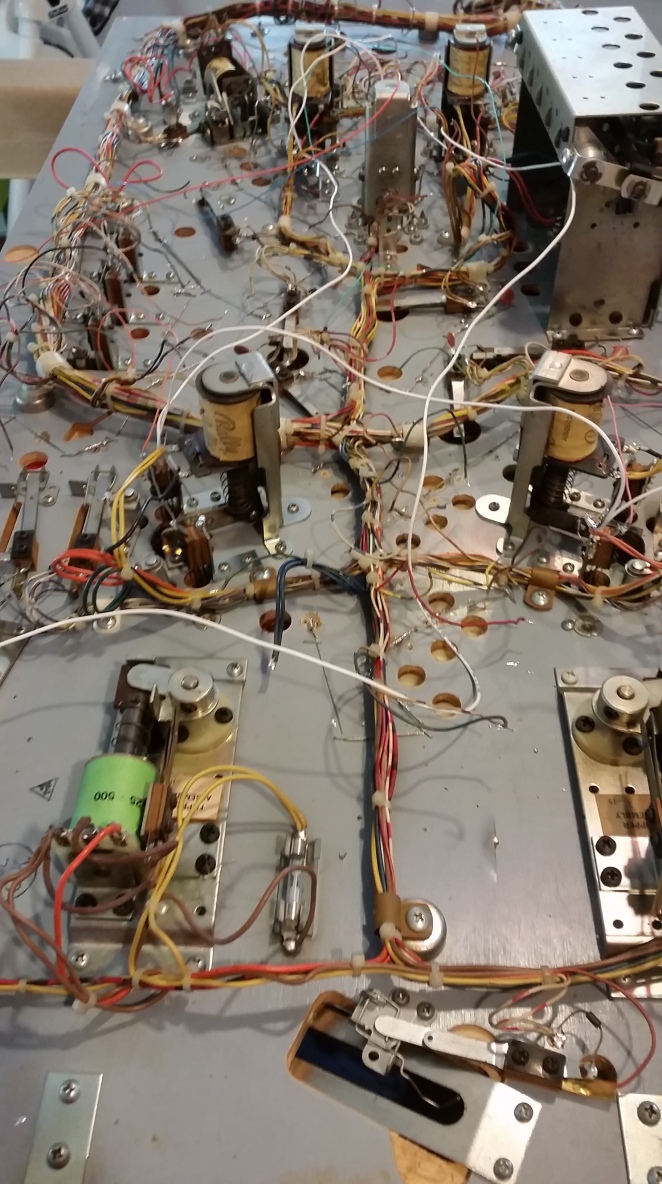
J’ai donc reconstruit la matrice de contacts dans l’état d’origine et commencé à appliquer la lecture de celui ci sur l’Arduino.
Un peu de code disponible ici, attention ça tache, c’est du draft-n-quick-n-dirty, sur mon github, pleins d’évolutions sont à venir.
Après la gestion des contacts, j’ai appliqué la gestion des règles matérielles comme prévu pour l’intégration avec le Mission Pinball Framework.
En attendant la gestion de la communication MPF entre l’Arduino et le Raspberry Pi, les règles de base sont ajoutées en dur dans le lancement du code:
- réaction des bumpers
- réaction des slingshots
- gestion des flippers (par des contacts en dehors de la matrice)
- quelques autres contacts permettent de relancer une bille, de relever les targets, etc.
Une petite vidéo qui montre l’activité des cartes de puissance:
Et une autre vue plus générale du flipper:
Prochaines étapes:
Terminer la communication pour informer MPF de ce qui se passe sur le plateau de jeu, et que MPF puisse envoyer des commandes.