Communication
Peu d’articles dans ce blog, mais du progrès coté programmation ! Le raspberry et l’arduino communiquent enfin !
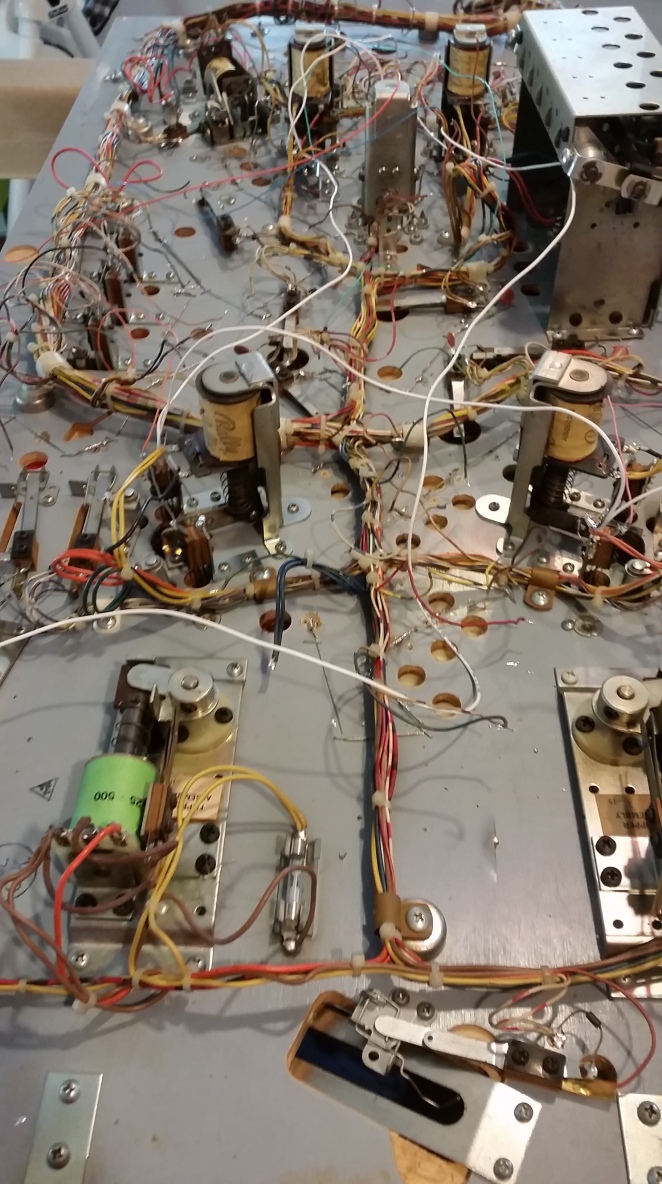
L’arduino renvoie en temps réel l’état des capteurs (matrice de switch), mais aussi boutons cablés en direct (flips et bouton start). Le raspberry traduit ça en score via mpf.
De son coté, le raspberry/mpf envoie les macros matérieles pour que l’arduino réagisse plus rapidement et en autonomie au bumpers, slingshots et flips.
Une courte démo:
De nouveaux problèmes…
Raspberry instable
Depuis peu, et sans raison apparente, je subis des plantages réguliers du raspberry, complètement freeze. J’exclus un problème d’alimentation car le raspberry est directement relié à une alim ATX de PC, que j’imagine plutôt stable et pas en manque de puissance. Pourtant j’ai souvent le logo de pb d’alim en surbrillance sur l’écran. Les processus python mpf sont à 98% d’occupation du processeur.
J’ai pensé à de la surchauffe car je n’ai pas installé les dissipateurs sur le raspberry, mais je ne trouve pas celui ci trop chaud. Dans le doute j’ai ajouté un ventilateur, mais sans résultat.
Dialogue de sourd
Je perds des morceaux de trames du raspberry vers l’arduino. Dans l’autre sens la communication est stable et complète. Bizarrement, c’est plus stable à 115200 qu’à 9600 bauds.
Prochaines étapes
Debug, debug, debug, logiciel et matériel…
En parallèle, sans avoir besoin d’être devant le flipper, je continue le développement des règles du Supersonic dans les fichiers de configuration du mission pinball !